




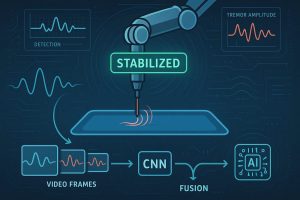


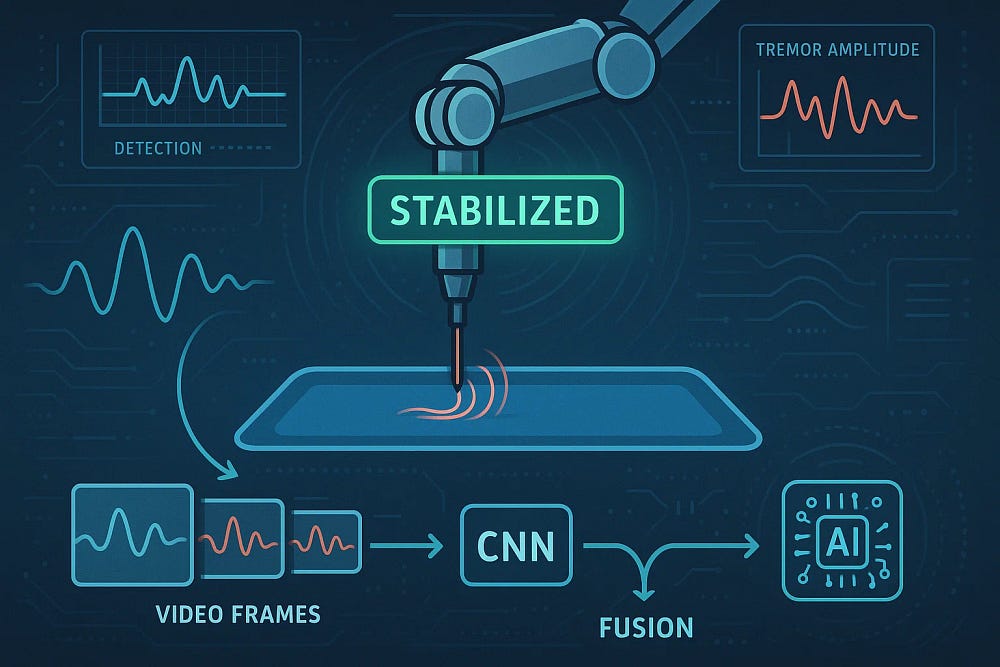
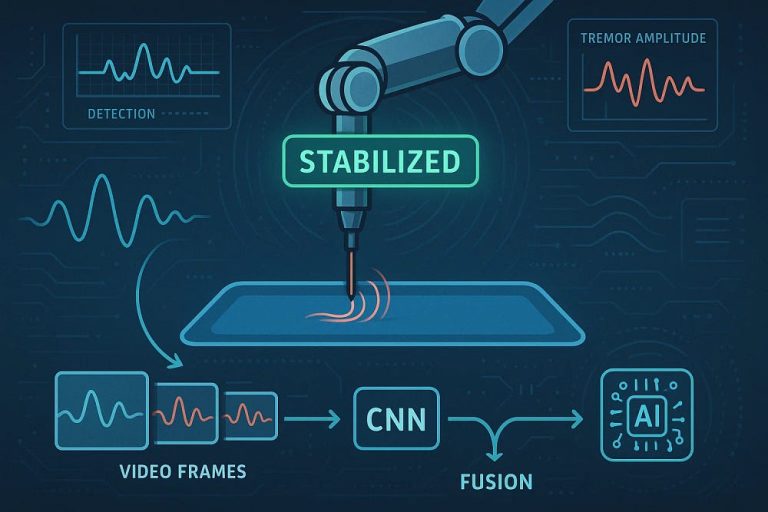
Develop an AI system that detects fine tremors in robotic surgical tools using video and accelerometer (IMU) data, enabling real-time correction feedback and precision overlay.
Input Modalities
1. Tool Movement Video Feed
- High-frame-rate endoscopic or external video of robotic arm
- Extracted frames → CNN input
2. Accelerometer / IMU Data
- Sampled at high frequency (100–200Hz)
- 3-axis data:
[acc_x, acc_y, acc_z] - Synced with video timestamps
Project Structure
bash
TremorDetection/
├── data/
│ ├── imu/ # CSV/TSV with accelerometer readings
│ └── videos/ # Robotic tool movement clips
├── models/
│ ├── cnn_model.py
│ ├── lstm_model.py
│ └── fusion_model.py
├── utils/
│ ├── fft_analysis.py
│ └── sync_tools.py
├── scripts/
│ ├── train_fusion.py
│ ├── infer_realtime.py
│ └── visualize_overlay.py
└── dashboard/
└── tremor_ui.py
Step 1: IMU Preprocessing + FFT
python
# utils/fft_analysis.py
import numpy as np
from scipy.fftpack import fft
def extract_fft_features(signal, fs=200):
"""Return FFT magnitude and dominant frequency."""
N = len(signal)
freqs = np.fft.fftfreq(N, d=1/fs)
fft_vals = np.abs(fft(signal))
dom_freq = freqs[np.argmax(fft_vals[1:N//2])]
return dom_freq, fft_vals
Step 2: CNN for Visual Tremor Detection
python
# models/cnn_model.py
import torch.nn as nn
class TremorCNN(nn.Module):
def __init__(self):
super().__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 16, 5, stride=2),
nn.ReLU(),
nn.Conv2d(16, 32, 3),
nn.ReLU(),
nn.Flatten()
)
self.classifier = nn.Sequential(
nn.Linear(32*29*29, 128),
nn.ReLU(),
nn.Linear(128, 2) # Tremor/No Tremor
)
def forward(self, x):
x = self.features(x)
return self.classifier(x)
Step 3: LSTM for Accelerometer Tremor Classification
python
# models/lstm_model.py
import torch.nn as nn
class IMULSTM(nn.Module):
def __init__(self, input_size=3, hidden_size=64):
super().__init__()
self.lstm = nn.LSTM(input_size, hidden_size, batch_first=True)
self.classifier = nn.Sequential(
nn.Linear(hidden_size, 64),
nn.ReLU(),
nn.Linear(64, 2)
)
def forward(self, x):
_, (h, _) = self.lstm(x)
return self.classifier(h[-1])
Step 4: Fusion Architecture
python
# models/fusion_model.py
class FusionModel(nn.Module):
def __init__(self, cnn, lstm):
super().__init__()
self.cnn = cnn
self.lstm = lstm
self.fc = nn.Sequential(
nn.Linear(4, 64),
nn.ReLU(),
nn.Linear(64, 2)
)
def forward(self, image, imu):
cnn_out = self.cnn(image) # shape: (B, 2)
lstm_out = self.lstm(imu) # shape: (B, 2)
fused = torch.cat([cnn_out, lstm_out], dim=1)
return self.fc(fused)
Step 5: Real-Time Feedback Logic
python
# scripts/infer_realtime.py
import cv2
import serial
from models.fusion_model import FusionModel
cap = cv2.VideoCapture(0)
imu_data_buffer = []
model.eval()
while True:
ret, frame = cap.read()
imu_vector = get_realtime_imu_data()
tremor_prob = model(frame, imu_vector)
if tremor_prob[0,1] > 0.7:
print("⚠️ Tremor Detected!")
send_signal_to_robot_controller()
Step 6: Visual Overlay of Instability
python
# scripts/visualize_overlay.py
import matplotlib.pyplot as plt
def overlay_tremor(frame, prob):
label = "Tremor" if prob > 0.5 else "Stable"
color = (0,0,255) if prob > 0.5 else (0,255,0)
cv2.putText(frame, label, (20, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, color, 2)
return frame
Optional: Streamlit Dashboard
python
# dashboard/tremor_ui.py
import streamlit as st
st.title("🔬 Real-Time Tremor Detection")
video = st.file_uploader("Upload Tool Video")
imu = st.file_uploader("Upload IMU CSV")
if video and imu:
st.success("Data Uploaded! Run model below 👇")
if st.button("Run Detection"):
st.video(video)
st.line_chart(imu_df["acc_z"])
Evaluation Metrics
- Tremor Recall (no false negatives)
- Precision (avoid over-triggering)
- Temporal Resolution (detection within <100 ms)
Advanced Ideas
- Use SlowFast for video tremor modeling
- Add Kalman filter for IMU noise smoothing
- Generate Tremor Heatmaps on tool tip trajectory
- Integrate into ROS2 + MoveIt for real-time correction







+ There are no comments
Add yours